Despite their beauty, glaciers can be very hostile environments for us scientists. Crevasses, seracs and other non-traversable terrain renders data sampling for glacier research difficult and dangerous, if not impossible. We believe that unmanned aerial vehicles (“UAVs”, commonly named drones) are key to mitigate this risk and to reach these locations safely. Oftentimes, UAVs are manually piloted using aids such as first-person-view goggles, that support the pilot’s situational awareness to some degree.
However, the nature of glaciers can make visual flight very difficult, especially through a camera link. Perceiving distance and scale in an environment full of self-similarities at different scales, very harsh lighting conditions, and regions without features at all, is not an easy task.
In this collaboration between the Autonomous Systems Lab at ETH Zurich and the Glaciology and Geomorphodynamics Group at University of Zurich, we aim at using state-of-the-art and novel robotics research for autonomous flight to the benefit of glacial and polar research. This targets two applications: i) the autonomous retrieval of ice samples using a drilling UAV; and ii) the autonomous deployment of in-situ instruments using tilt-wing UAV – both projects being currently funded by the SPI. Fieldworks took place at Rhone Glacier in summer 2021 to test these drones in real-world conditions.
Dealing with complex icy topography
As for humans, the major challenges for robots are in perceiving the environment. Not so much for the flying part of a mission, as we can still use well-known sensing modalities such as GPS and Inertial Measurement Units (IMUs) to know where we are and how to move in order to control our flight.
But what goes up comes down again – so regardless of the mission, sooner or later we have to deal with the terrain below us. Especially for missions such as extracting ice cores (more on this further below) or placing GPS receivers, a good understanding of the terrain is needed. Here we focus on finding safe landing sites based on geometry and texture of the glacier surface.
Teaching robots to understand the glacial environment
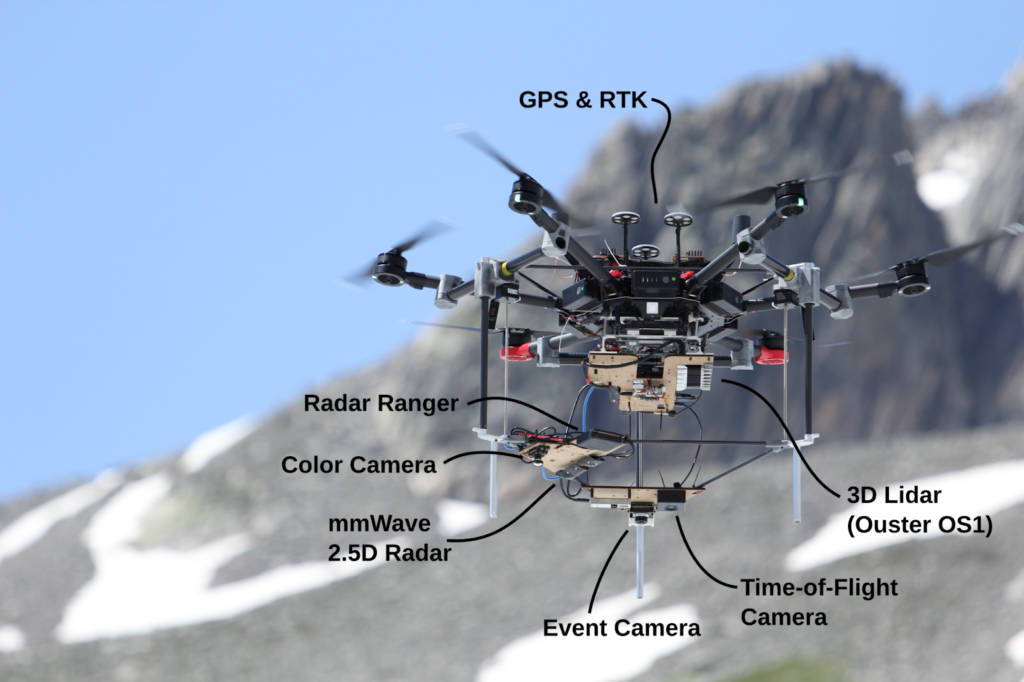
In a first survey mission, we recorded surface data from a multitude of sensor modalities – LIDAR, 1D-Radar, 2.5D-Radar, color camera, thermal cameras and depth cameras.
The resulting data is then used to create ground truth models of the environment (photogrammetry and lidar) and to evaluate the feasibility of the different modalities for glacier flying missions. Also, we use the obtained data to train neural networks to understand what safe landing locations on glaciers look like.
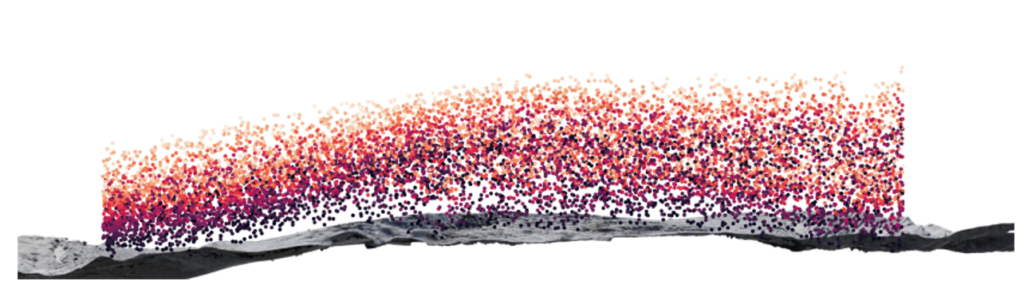
As neural networks need vast amounts of data, we increase our dataset by using a 3D reconstruction of the glacier to render thousands of artificial but photorealistic images in different orientations and lighting conditions.
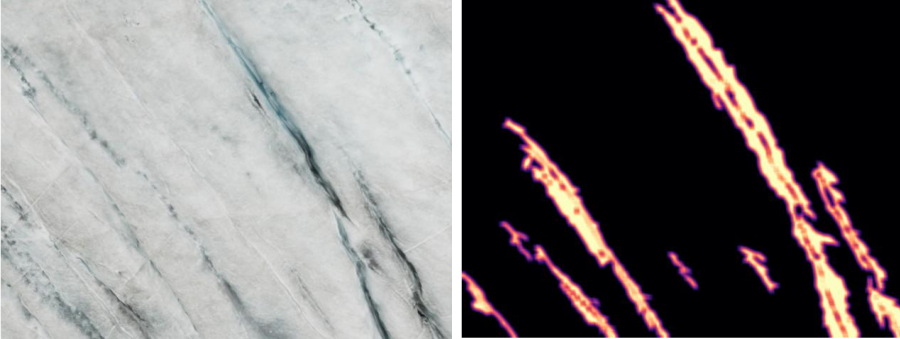
Feeding this wealth of data together with ground truth information through a neural network, we obtain a classifier that “understands” glacial environments based on image and radar data. We use the classifier to output landability maps that tell us locally safe locations for landing and/or ice-coring.
Ice coring
One of the motivations for performing safe landings on a glacier is to obtain ice core samples – theoretically without setting a foot on ice. Our large drone can carry a reproduction of a flying ice coring system performed by Carlson et al. at Aarhus University.

Together with the whole drill assembly, an ice core and all the sensors, our system is quite heavy (~16kg). We have therefore been evaluating different motor-gearbox combinations to find a good weight/power/torque ratio.
Experimental robotics in alpine environments

Performing robotics research on a glacier is not trivial. The used system integrations are usually hand built, one-of-a-kind experimental platforms that are necessary but a lot less reliable than commercial products. This means that even on an easy to access glacier such as the Rhone glacier, a wealth of spare parts have to be brought (and carried). As we can never account for all eventualities, improvisation on the ice is a crucial skill. Loose connections, confused sensors, crashing drones – the harsh reality of robotics research outside of a cozy lab teaches a lot about bringing our advanced algorithms to the big outdoors.
But whatever challenge our robots throw at us, the beauty of nature (and some good Rösti in the evening) always more than compensates for it!

This research was supported by SPI Technogrants held by Guillaume Jouvet, senior researcher at the University of Zurich, and Thomas Stastny, senior researcher at ETH Zurich. Michael Pantic is a PhD student at ETHZ who participated in the field tests that were conducted during the summer of 2021 and to which this field note relates.
Header photograph: UAV on the Rhone Glacier. © 2021 Autonomous Systems Lab (ETHZ), all rights reserved