Moulins are near vertical drainage shafts for surface meltwater in ice sheets. On Earth’s large ice sheets, they can be several hundred metres deep. While we assume they are vertical, we now know that moulins can form complex geometries with the ability to store significant amounts of water. As such they are an important element when it comes to modelling and predicting the evolution of our glaciers.
For this project, we set out to develop robots with sensors that can abseil into the glacial moulins of the Mer de Glace glacier, Mont Blanc, and survey them. As engineering PhD students at the CREATE Lab at EPFL in Lausanne, we build robots to support scientists in their work. Our robots can for example collect data or retrieve samples from places which are too dangerous for humans to access. In our workshop, we have all the tools to rapidly fabricate new robotic systems. Our aim is always to deploy these systems and evaluate them in field tests.

Each of our robots is unique in its design, sensor setup and software, and is typically developed with a clear scientific application in mind. As we deploy our robots to environments where we do not necessarily know the environmental conditions ahead, we need to be able to flexibly and quickly react and adapt our robots. When we arrive at our test sites, we typically convert any cabin, hotel room or Airbnb to a full-sized robotics workshop within the first hour.

When all robots and equipment are prepared, we set out for experiments in the field. Our gear includes not only mountaineering equipment, but also gasoline generators and technical equipment for the robots. Depending on the test site, the gear required for humans is already significant and leaves little room for carrying technical equipment. The moulins of the Mer de Glace are accessible by foot and we carried all the gear up to the moulins.

Upon arrival at the test site, we set up a base camp and prepared the site for deploying our robots. The base camp allowed us to leave some equipment overnight at the test site when we would return to our accommodation. We would only bring back the robots that we would work on during the evening and return with an updated or fixed version the following morning.

The robot and sensory rig are rappelled in the centre of the moulin from a tether which we span across the moulin. The robot has an onboard winch to rappel and two horizontal thrusters to stabilise its orientation and position during data acquisition. This setup allowed the robot to rappel around 30m into the moulin and record point cloud data and images of the moulin’s icy walls.

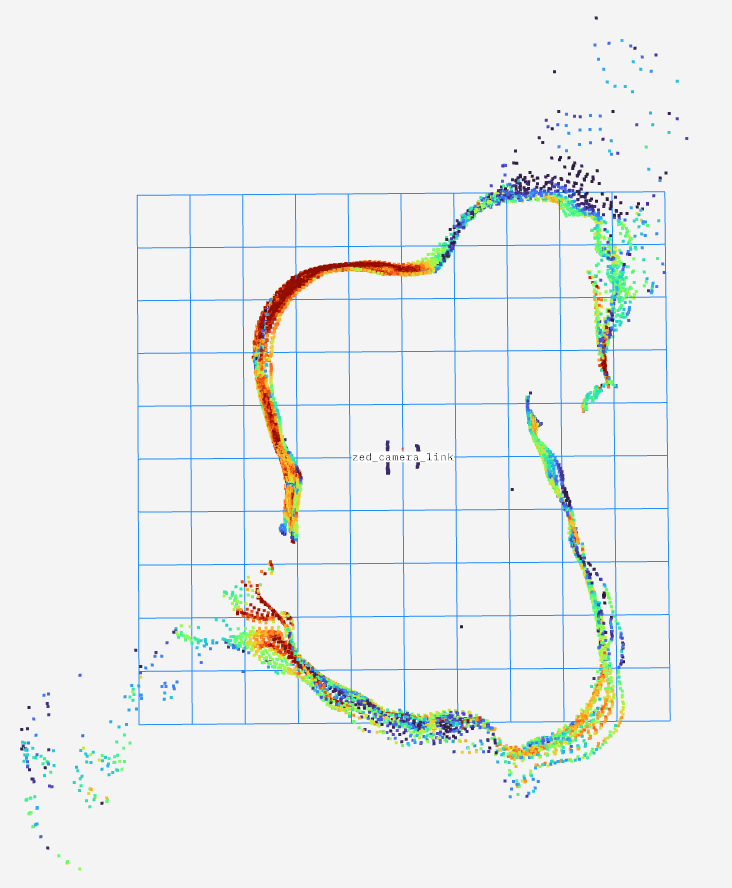
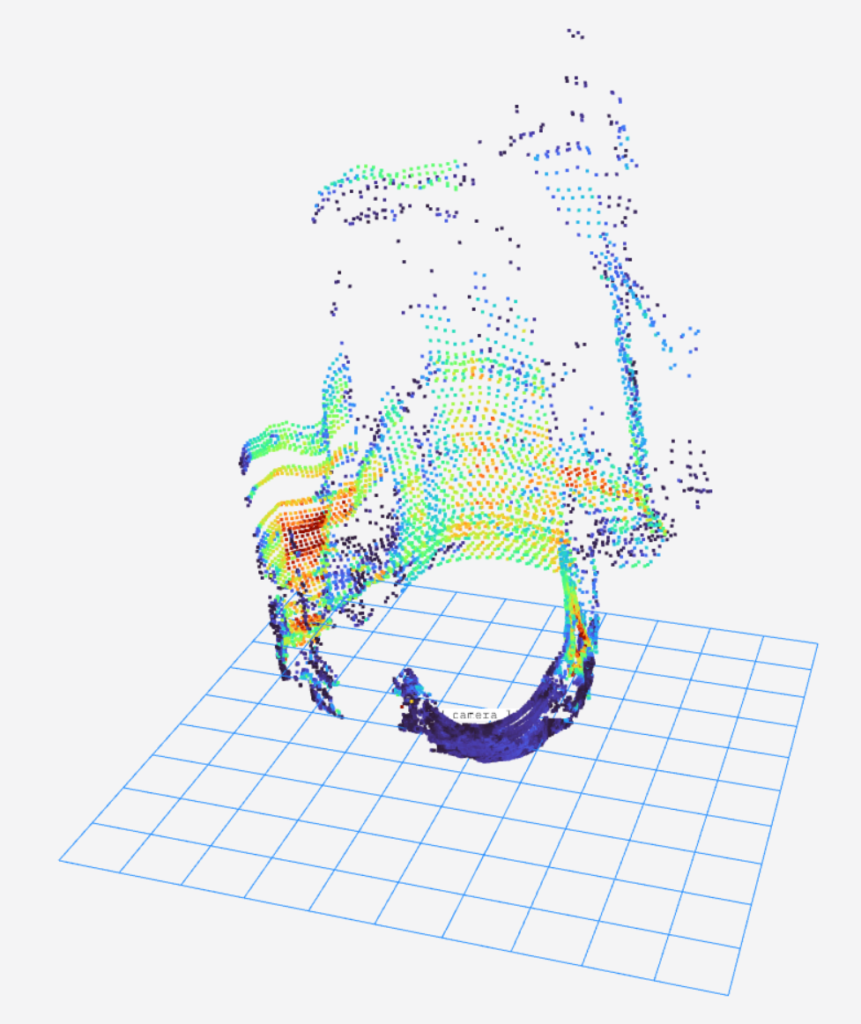
The retrieved point cloud data from each laser scan can be used to measure the cross section of a moulin. By combining multiple scans into one large point cloud, we can calculate and obtain a three-dimensional geometric model of the moulin.
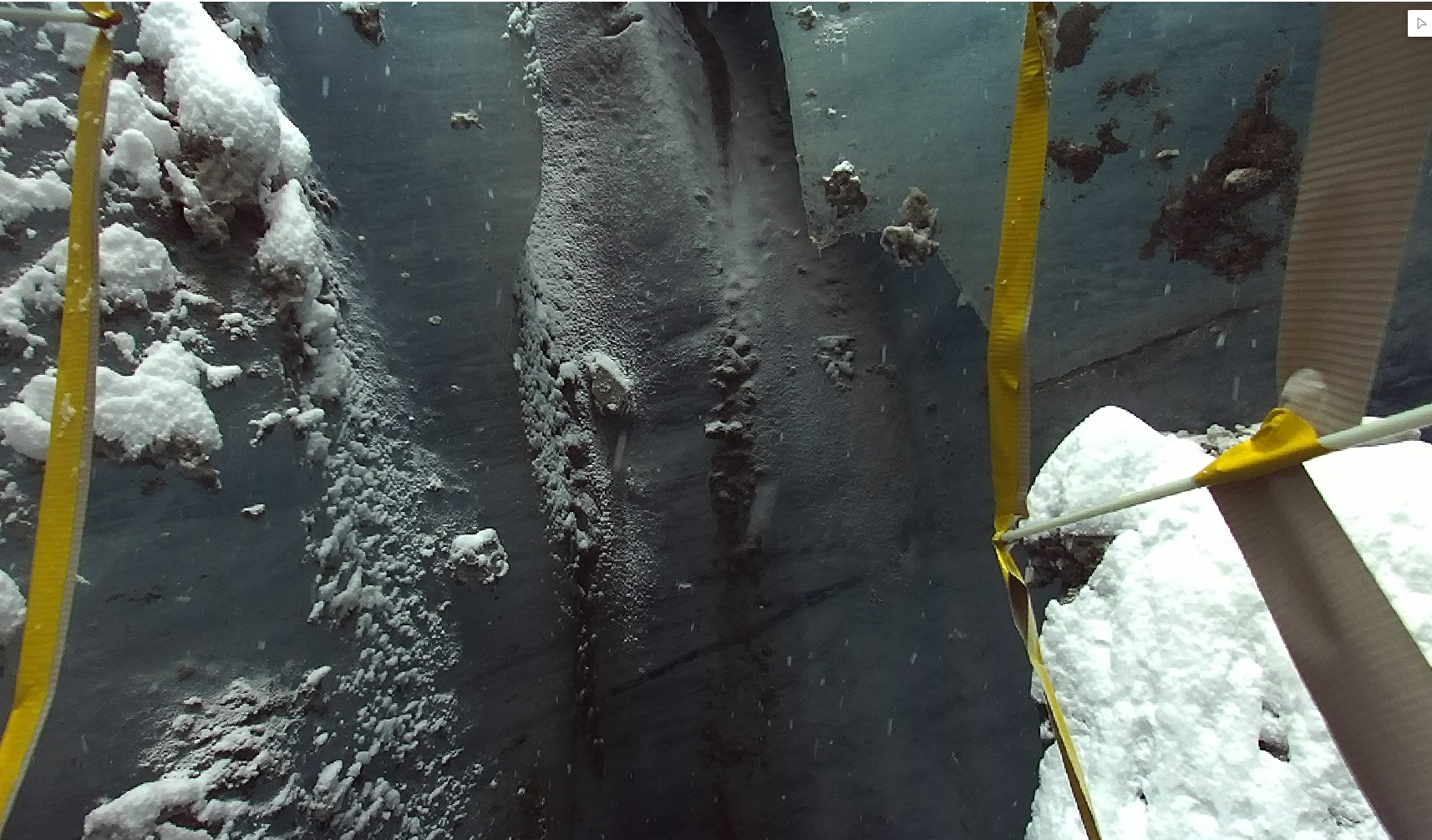
The robot’s two cameras are used to capture high-resolution images while rappelling into the moulin. From these images, we can extract additional information about the environment inside moulins. They enable us for example to observe pebbles and stones entrapped in the ice.

Throughout this project, we have evaluated different sensor configurations and varied robot designs for their applicability in harsh glacial conditions. While we learned many lessons on general robot development for extreme environments, we also got to understand the specific condition inside moulins and glaciers. In the future, we will benefit from this experience to develop robots that can not only rappel into moulins, but also can use moulins to enter the network of sub- and englacial streams. To date, little is known about these environments as they are dangerous and difficult to access.
Max Polzin is a robotics engineer and doctoral assistant at the Computational Robot Design & Fabrication Lab (CREATE) at EPFL, Switzerland. His fieldtrip took place in summer 2022 and 2023 with financial support from a Polar Access Fund grant.
- Read more about Max Polzin’s project